About:
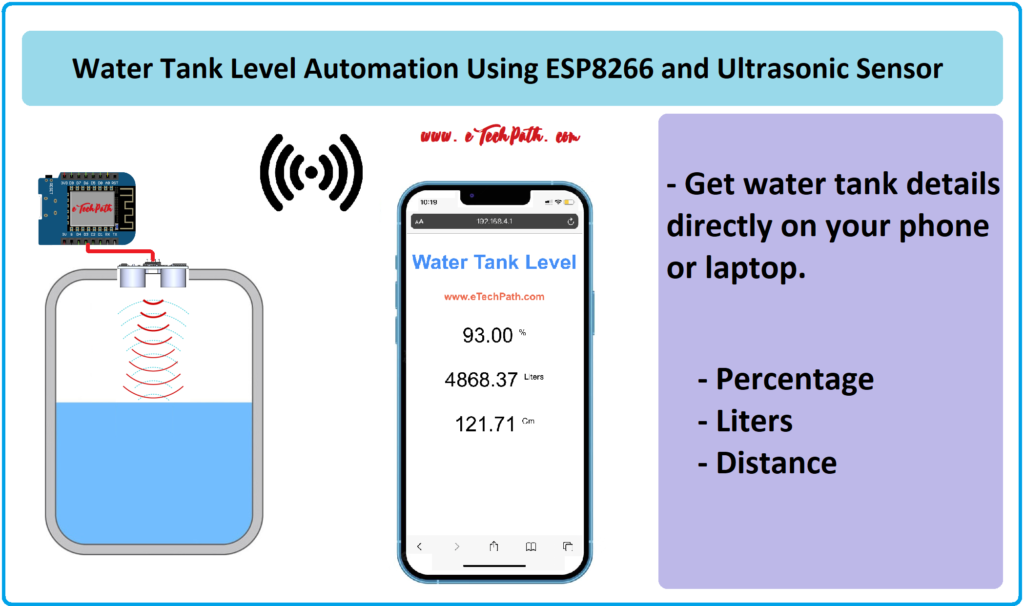
In this tutorial, we will learn how to interface hc-sr04 ultrasonic sensor with ESP8266 module and display the water tank level on mobile browser.
Table of Contents:
- HC-SR04 Module
- How Ultrasonic sensor works
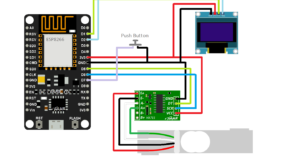
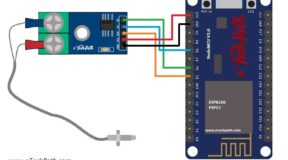
- Interfacing sensor module with NodeMCU
- Programming NodeMCU with ArduinoIDE
HC-SR04 Module and How it works
HC-SR04 is an Ultrasonic sensor module which includes ultrasonic transmitter, receiver and control circuit in single compact PCB. HC-SR04 has distance measurement ability ranging from 2cm to 400cm. These small units are very accurate, and its accuracy can be reach up to 3mm.
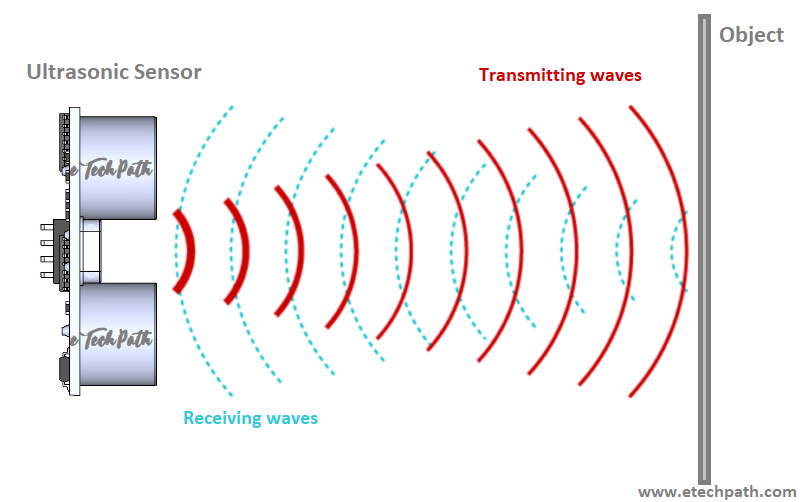
Ultrasonic modules work on the principle similar to radar or sonar- sensors. It generates high frequency signals from the transmitter of about 40kHz towards the sensing object and receives echo signal back to the receiver. Then we can calculate object distance using time interval between the sending of signal and the receiving of echo pulse.
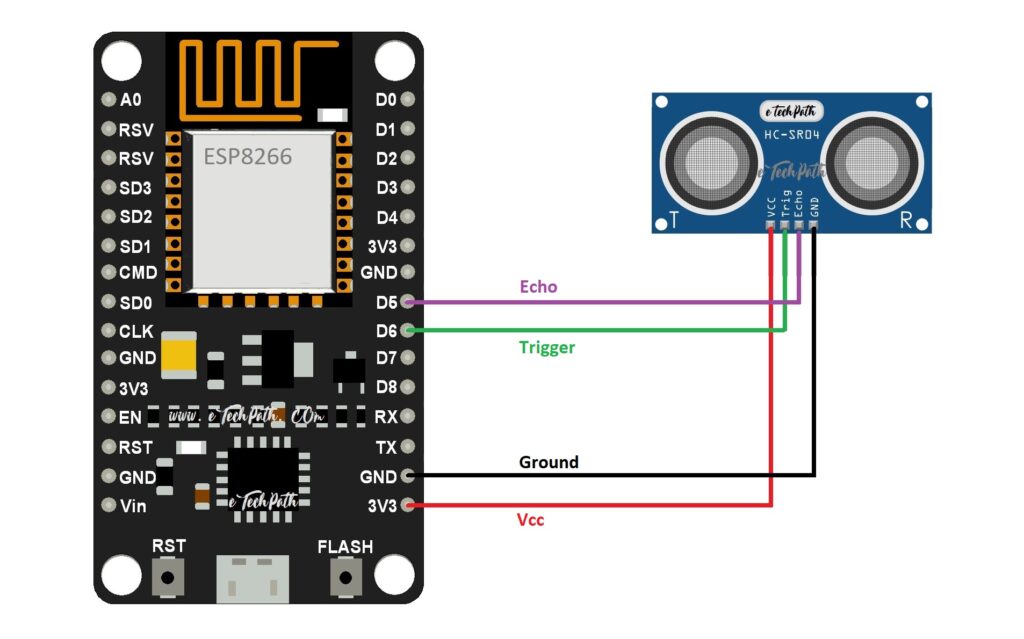
Circuit Diagram:
Libraries:
- ESP8266 board manager Follow this simple tutorial
- HC-SR04 GitHub link (zip)
- ESPAsyncWebServer GitHub link (zip)
- ESPAsyncTCP GitHub link (zip)
Code:
#include <Arduino.h>
#include <ESP8266WiFi.h>
#include <Hash.h>
#include <ESPAsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <HCSR04.h>
const char* ssid = "WaterLevel"; //Access point ssid
const char* password = "12341234"; //Access point password
float l = 0.0;
float per = 0.0;
float fcm = 0;
//Rectangular Tank dimentions in cm
float lcm = 200; //Length
float bcm = 200; // width
float hcm = 130; // Height, from Sensor to tank bottom
HCSR04 ultrasonicSensor(D6, D5, 20, 300);
AsyncWebServer server(80);
unsigned long previousMillis = 0;
const long interval = 1000;
const char index_html[] PROGMEM = R"rawliteral(
<!DOCTYPE HTML><html>
<head>
<meta name="viewport" content="width=device-width, initial-scale=1">
<style>
html {
font-family: Arial;
display: inline-block;
margin: 0px auto;
text-align: center;
}
h2 { font-size: 3.0rem; Color:DodgerBlue; }
h3 { font-size: 1.5rem; Color:Tomato; }
p { font-size: 3.0rem; }
.units { font-size: 1.2rem; }
.temp-labels{
font-size: 1.5rem;
vertical-align:middle;
padding-bottom: 10px;
}
</style>
</head>
<body>
<h2>Water Tank Level</h2>
<h3>www.eTechPath.com</h3>
<p>
<span id="permap">%PERMAP%</span>
<sup class="units">%</sup>
</p>
<p>
<span id="liter">%LITER%</span>
<sup class="units">Liters</sup>
</p>
<p>
<span id="distance">%DISTANCE%</span>
<sup class="units">Cm</sup>
</p>
</body>
<script>
setInterval(function ( ) {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function() {
if (this.readyState == 4 && this.status == 200) {
document.getElementById("permap").innerHTML = this.responseText;
}
};
xhttp.open("GET", "/permap", true);
xhttp.send();
}, 1000 ) ;
setInterval(function ( ) {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function() {
if (this.readyState == 4 && this.status == 200) {
document.getElementById("liter").innerHTML = this.responseText;
}
};
xhttp.open("GET", "/liter", true);
xhttp.send();
}, 1000 ) ;
setInterval(function ( ) {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function() {
if (this.readyState == 4 && this.status == 200) {
document.getElementById("distance").innerHTML = this.responseText;
}
};
xhttp.open("GET", "/distance", true);
xhttp.send();
}, 1000 ) ;
</script>
</html>)rawliteral";
// Replaces placeholders with sensor values
String processor(const String& var){
if(var == "DISTANCE"){
return String(fcm);
}
else if(var == "LITER"){
return String(l);
}
else if(var == "PERMAP"){
return String(per);
}
return String();
}
void setup(){
Serial.begin(115200);
ultrasonicSensor.begin();
Serial.print("Setting AP (Access Point)…");
WiFi.softAP(ssid, password);
IPAddress IP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(IP);
Serial.println(WiFi.localIP());
// Route for root
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/html", index_html, processor);
});
server.on("/permap", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/plain", String(per).c_str());
});
server.on("/liter", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/plain", String(l).c_str());
});
server.on("/distance", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/plain", String(fcm).c_str());
});
server.begin();
}
void loop()
{
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval)
{
previousMillis = currentMillis;
float newdistance = ultrasonicSensor.getMedianFilterDistance(); //pass 3 measurements through median filter, better result on moving obstacles
if (newdistance != HCSR04_OUT_OF_RANGE)
{
Serial.print("sensor raw value:");
Serial.println(newdistance);
fcm = hcm - newdistance;
float v = fcm * lcm * bcm ;
l = v / 1000;
per = map(fcm, 0, hcm, 0, 100);
Serial.println(per);
Serial.println(l);
Serial.println(fcm);
}
else
{
Serial.println(F("out of range"));
}
}
}